|
I obtained my PhD degree from HKUST in 2025, supervised by Prof. Ling Shi. I obtained my MPhil degree from HKUST in 2021 and bachelor degree from PolyU in 2019. From Oct 2021 to Aug 2022, I was a full-time C++ software engineer in Huawei Car BU. I also have some experiences in robotics, control and learning, including a reseach intern in Tencent RoboticsX and a research intern in Huawei Noah's Ark Lab. My research interests lie at control, optimization and robotics. Currently, I am working on Lie-algebra optimal control and deep reinforcement learning for humanoid control. Slelected works are listed in Publications and Projects. In my spare time, there is nothing better than running in Victoria Harbour, hiking in MacLehose Trail and doing water sports in Clear Water Bay. Paper I read recently can be found in Reading Records. Email / Linkedin / Github / Reading Records |
|
|
Hong Kong University of Science and Technology, HK
Hong Kong University of Science and Technology, HK
Hong Kong Polytechnic University, HK
Carnegie Mellon University, Pitts |
RoboticsX, Tencent, Shenzhen
Noah's Ark Lab, Huawei, HK
Huawei Car Bu, Shanghai
ASM Pacific Technology, HK |
Publications
Journal Papers
[8] Learning-based Geometric Tracking Control for Rigid Body Dynamics with Model Uncertainty
Jiawei Tang, Shilei Li, Lisheng Kuang, and Ling Shi
IEEE Signal Processing Letters , accepted, 2025, [arxiv],[code]
[7] MINER-RRT: A Hierarchical and Fast Trajectory Planning Framework in 3D Cluttered Environments
Pengyu Wang, Jiawei Tang, Hi Wang Lin, Fan Zhang, Chaoqun Wang, Jiankun Wang, Max Q.-H Meng, Ling Shi
IEEE Transactions on Automation Science and Engineering (TASE) , accepted, 2024, [paper],[arxiv]
[6] Log-Barrier Search for Structural Linear Quadratic Regulators
Nachuan Yang, Jiawei Tang, Yuzhe Li, Guodong Shi, Ling Shi
IEEE Transactions on Automatic Control (TAC) , accepted, 2024, [paper]
[5] A Nonlinear Filter for Pose Estimation Based on Fast Unscented Transform on Lie Groups
Yuqiang Jin, Wen-An Zhang, Jiawei Tang, Hu Sun, Ling Shi
IEEE Robotics & Automation Letters (RAL) , accepted, 2024, [paper]
[4] APF-CPP: An Artificial Potential Field Based Multi-robot Online Coverage Path Planning Approach
Zikai Wang, Xiaoqi Zhao, Jiekai Zhang, Nachuan Yang, Penyu Wang, Jiawei Tang, Jiuzhou Zhang, Ling Sh
IEEE Robotics & Automation Letters (RAL) , accepted, 2024, [paper]
[3] GMPC: Geometric Model Predictive Control for Wheeled Mobile Robot Trajectory Tracking
Jiawei Tang, Shuang Wu, Bo Lan, Yahui Dong, Yuqiang Jin, Guangjian Tian, Wen-An Zhang, Ling Shi
IEEE Robotics & Automation Letters (RAL) , accepted, 2024, [paper], [arxiv], [code]
[2] Event-triggered Sensor Scheduling for Remote State Estimation with Error-Detecting Code
Yuxing Zhong, Jiawei Tang, Nachuan Yang, Dawei Shi, Ling Shi
IEEE Control Systems Letters (L-CSS) , accepted, 2023, [paper]
[1] Linear Quadratic Control of Positive Systems: A Projection-Based Approach
Nachuan Yang, Jiawei Tang, Yik Ben Wong, Yuzhe Li, Ling Shi
IEEE Transactions on Automatic Control (TAC) , accepted, 2023, [paper]
Conference Papers
[5] Lie-algebra Learning-based Tracking Control for Differential Wheeled Robots with Model Uncertainty
Jiawei Tang, Nachuan Yang, Shuang Wu, Shilei Li, Dawei Shi, Ling Shi
21st IEEE International Conference on Automation Science and Engineering (CASE) , accepted, 2025, [arxiv]
[4] Direct Shooting Method for Second-order Systems: An Improved Transcription Method
Jiawei Tang, Yuxing Zhong, Pengyu Wang, Xingzhou Chen, Shuang Wu, Ling Shi
22nd European Control Conference (ECC) , accepted, 2024, [arxiv]
[3] Motion Planning for Mobile Robots with Noise: A Probabilistic MPC Approach
Jiawei Tang, Yik Ben Wong, Zhengyu Fu, Nachuan Yang, Sil Kwong Tse, Winnie Suk Wai Leung, Ling Shi
13th Asian Control Conference (ASCC) , accepted, 2022, [paper] [demo]
[2] LQR Design for Discrete-Time Positive Systems: A First-Order Method
Nachuan Yang, Jiawei Tang, Yuzhe Li, Ling Shi
61st IEEE Conference on Decision and Control (CDC), accepted, 2022, [paper]
[1] Relative State Formation-based Warehouse Multi-robot Collaborative Parcel Moving
Sil Kwong Tse, Yik Ben Wong, Jiawei Tang, Peihu Duan, Suk Wai Winnie Leung, Ling Shi
IEEE Industrial Cyber-Physical Systems (ICPS) , accepted, 2021, [paper] [demo]
|
|
|
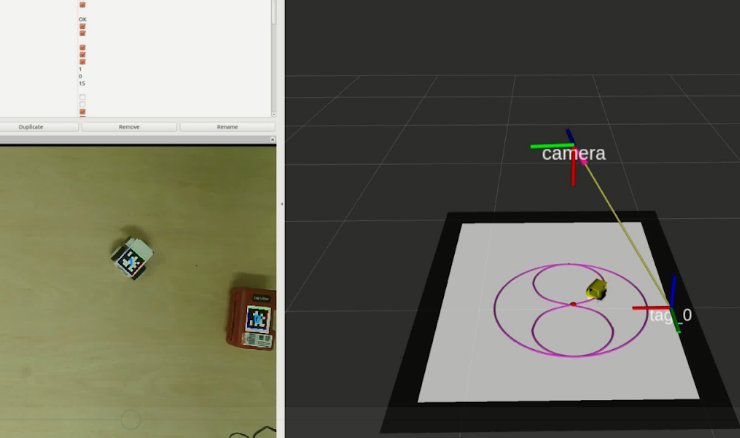
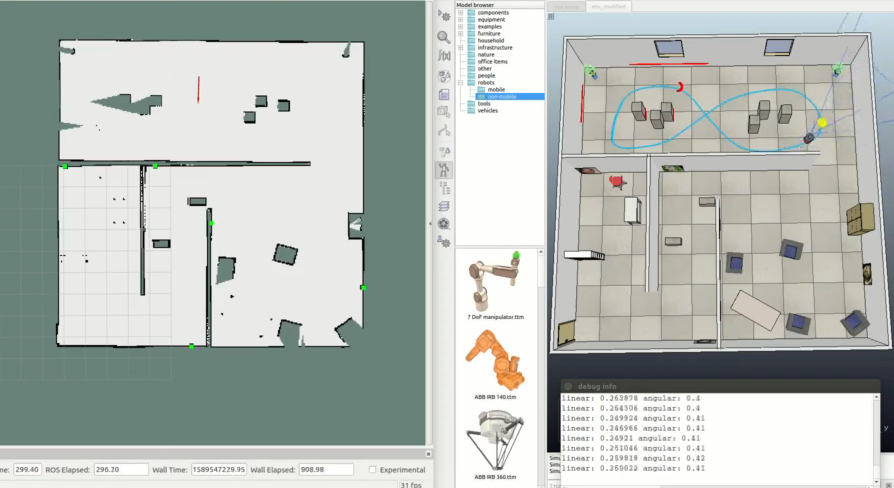
Jiawei Tang*, Sil Kwong Tse*, Yik Ben Wong* We built a physical multi-robot testbed and a ROS-based simulation platform from scratch. We demonstrated various control algorithms, including formation control, path planning with MPC, cooperative control, extended Kalman filter, and so on. |
|
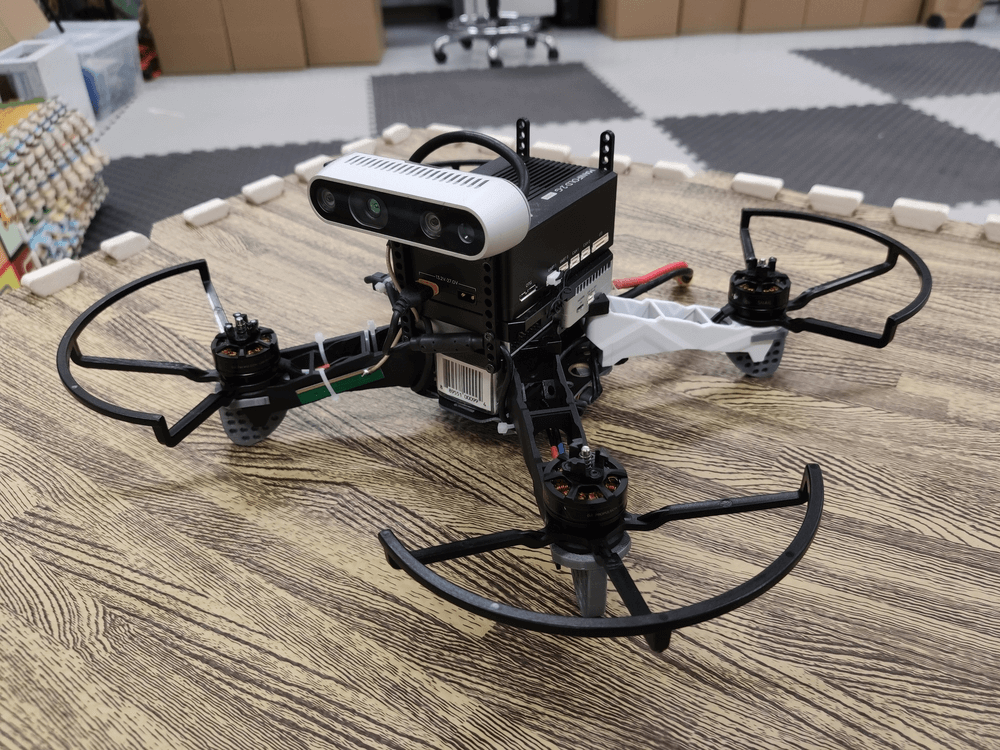
Jiawei Tang An integrated project on a quadrotor, where I implemented optimal path planner, optimization-based trajectory generator and two-loop PID controller for control and planning, optical flow based visual odometry with a stereo camera, and extended Kalman filter for state estimation and sensor fusion. [code] |
|
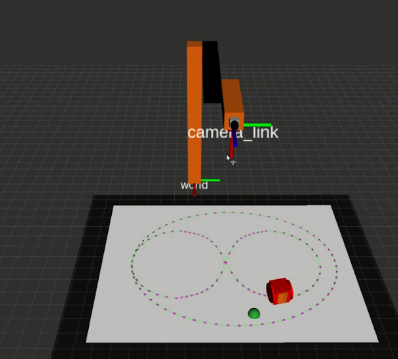
Jiawei Tang I implemented a learning-based position control algorithm for fun. The pipeline is based on Tai's IROS 2017. I implemented a Pytorch version and trained it for 1500 episodes in Gazebo simulation. The controller works but the performance...... [code] |
|
Jiawei Tang The final project of Robotic Perception and Learning (ELEC5670 & COMP5223) @ HKUST. Tasks include mobile robot control, SLAM, image recognition and localization, ball tracking with camera. [code] [demo] |
|
Jiawei Tang In my final-year project, I solved the low-resolution face recognition problem by considering the difference between high-resolution and low-resolution features. Meanwhile, I developed an online face verification demo page for this FYP based on Flask, HTML, javascript and CSS. [code] [poster] [demo] |
|
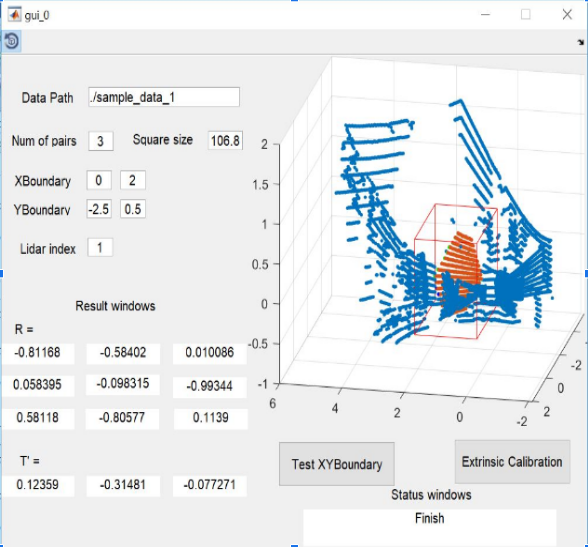
Jiawei Tang During my internship at RI, CMU. I developed A Matlab Extrinsic Calibration system of a camera and a 3D LiDAR using line and plane correspondences. [poster] [RISS paper] [demo] |
©2025, Jiawei Tang

|
|